work in progress day 0
This commit is contained in:
commit
c35ea00a6a
17 changed files with 37578 additions and 0 deletions
20181205_tafel.jpg20181213_Teststrecke35c3.png20181213_tafel.jpg20181222_Teststrecke35c3_gemessen.pngTeststrecke35c3_20181214.pdfTeststrecke35c3_20181214_screenshot.PNGTeststrecke35c3_20181222_gemessen.pdf
lichtschranke
teststecke_35c3_20180617a.dxfteststecke_35c3_20180617a_r12.dxfteststecke_35c3_20181213.dxfteststecke_35c3_20181213_r12.dxfteststrecke_35c3_20180617.pngteststrecke_35c3_20180617_text.pngteststrecke_35c3_20181205_boden.png
BIN
20181205_tafel.jpg
Normal file
BIN
20181205_tafel.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 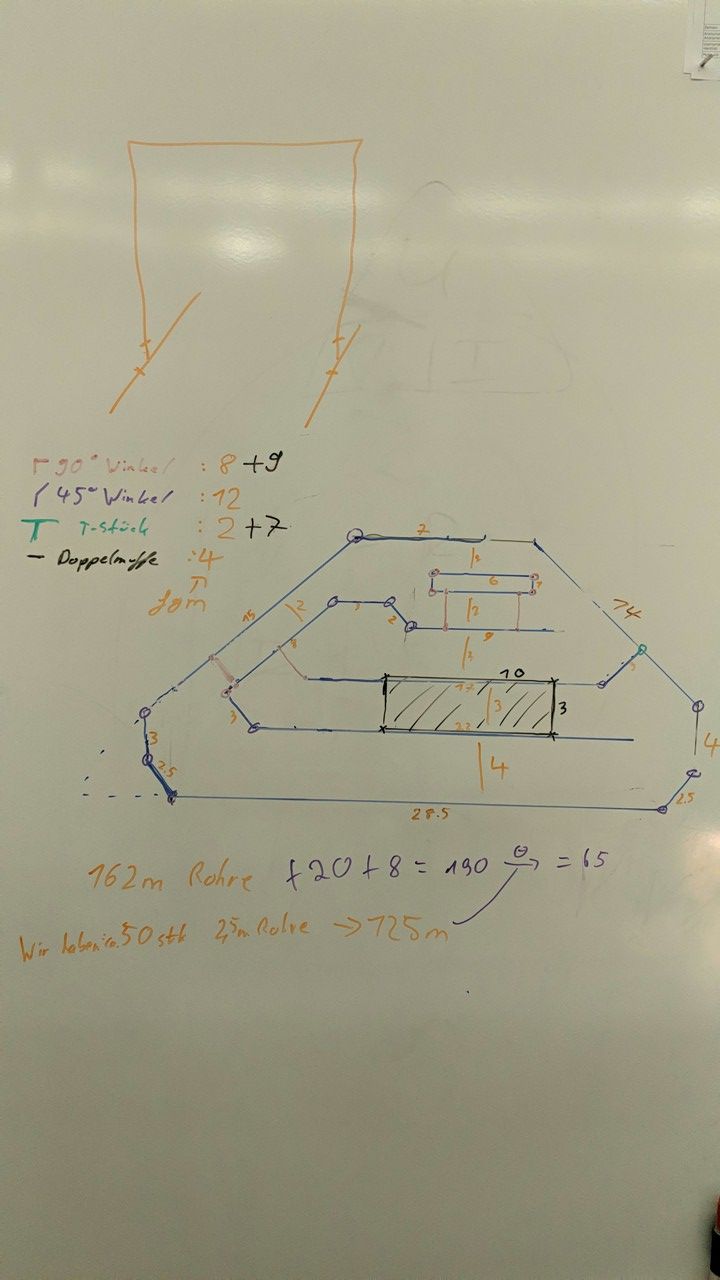
(image error) Size: 66 KiB |
BIN
20181213_Teststrecke35c3.png
Normal file
BIN
20181213_Teststrecke35c3.png
Normal file
{kind=link}
Binary file not shown.
|
After 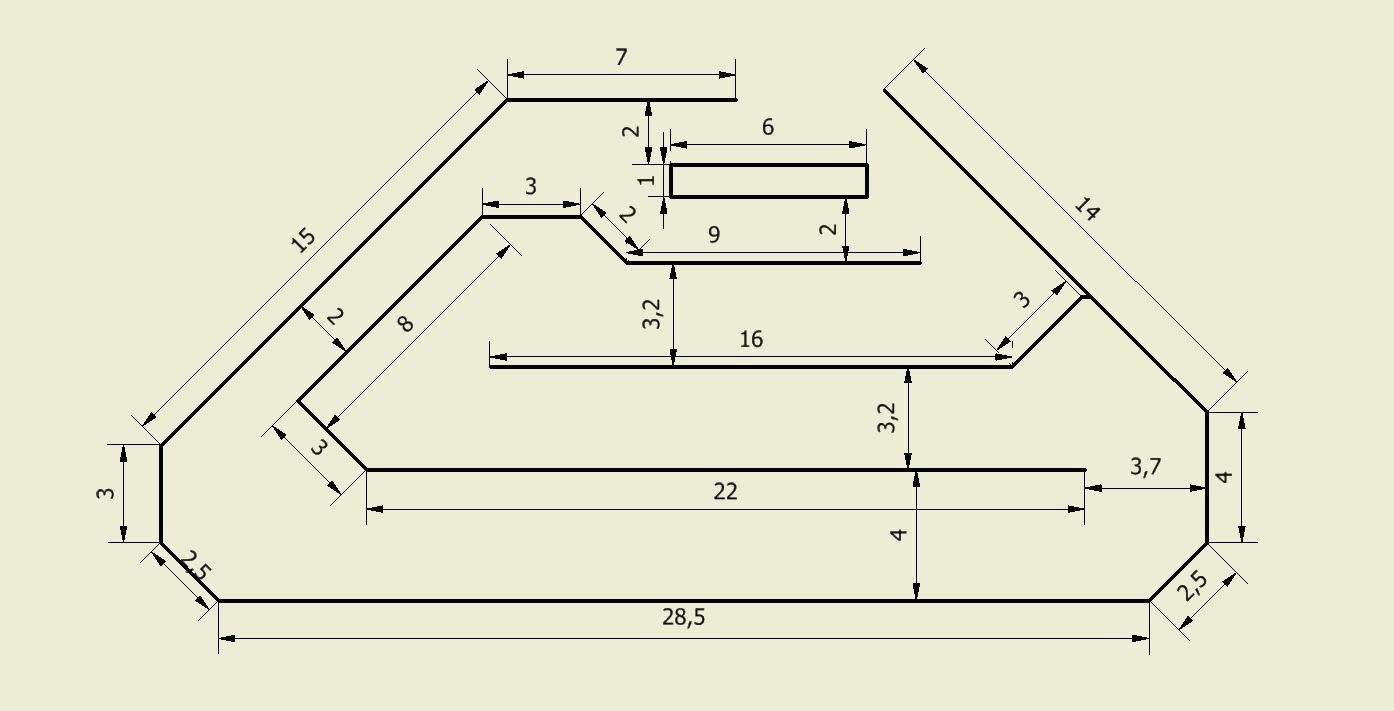
(image error) Size: 38 KiB |
BIN
20181213_tafel.jpg
Normal file
BIN
20181213_tafel.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 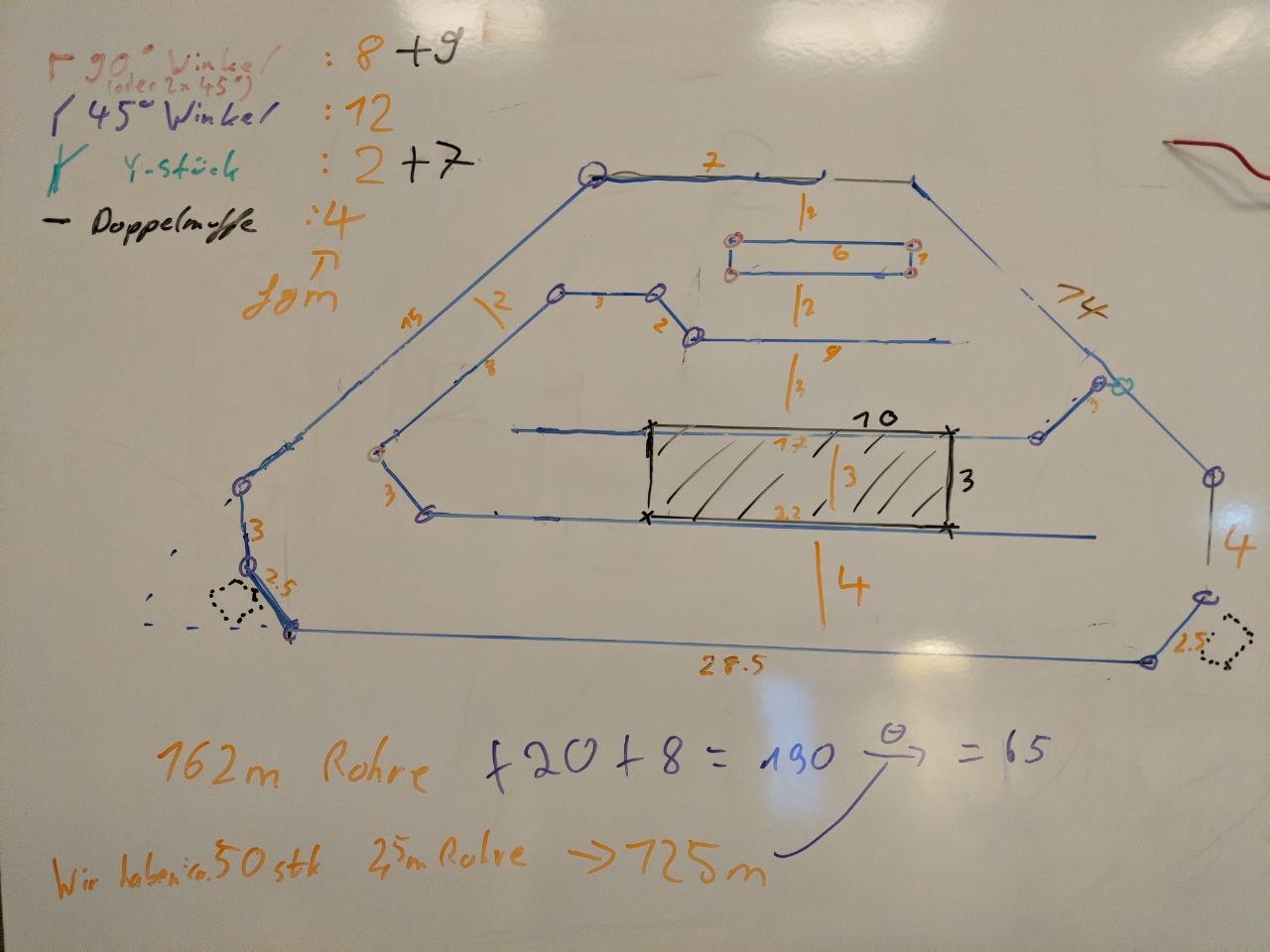
(image error) Size: 85 KiB |
BIN
20181222_Teststrecke35c3_gemessen.png
Normal file
BIN
20181222_Teststrecke35c3_gemessen.png
Normal file
{kind=link}
Binary file not shown.
|
After 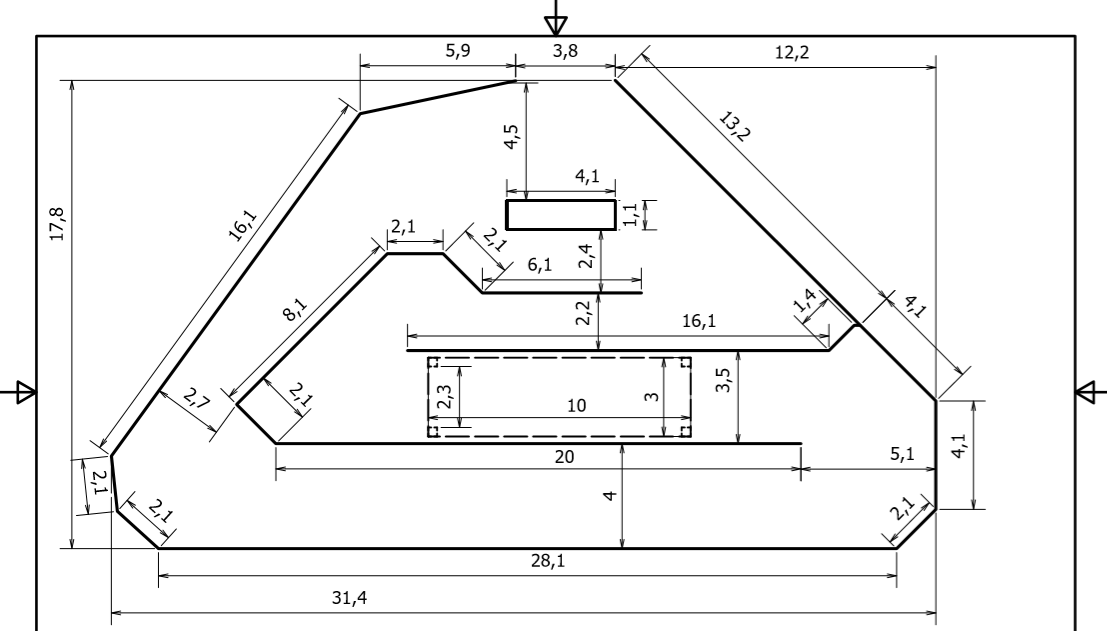
(image error) Size: 63 KiB |
BIN
Teststrecke35c3_20181214.pdf
Normal file
BIN
Teststrecke35c3_20181214.pdf
Normal file
Binary file not shown.
BIN
Teststrecke35c3_20181214_screenshot.PNG
Normal file
BIN
Teststrecke35c3_20181214_screenshot.PNG
Normal file
{kind=link}
Binary file not shown.
|
After 
(image error) Size: 41 KiB |
BIN
Teststrecke35c3_20181222_gemessen.pdf
Normal file
BIN
Teststrecke35c3_20181222_gemessen.pdf
Normal file
Binary file not shown.
125
lichtschranke/polling/polling.ino
Normal file
125
lichtschranke/polling/polling.ino
Normal file
|
|
@ -0,0 +1,125 @@
|
|||
#define PIN_LED 13
|
||||
#define PIN_SW1 2
|
||||
#define PIN_SW2 3
|
||||
#define PIN_FLASH 5
|
||||
volatile boolean sw1_flag = false;
|
||||
volatile boolean sw2_flag = false;
|
||||
|
||||
volatile boolean sw1_released = true;
|
||||
volatile boolean sw2_released = true;
|
||||
|
||||
unsigned long sw1_lastTime=0;
|
||||
unsigned long sw2_lastTime=0;
|
||||
|
||||
unsigned long sw1_lastTimeMicros=0;
|
||||
unsigned long sw2_lastTimeMicros=0;
|
||||
|
||||
#define SWDEBOUNCE 500
|
||||
|
||||
float sensordistance = 0.37; //in meters
|
||||
|
||||
#define TIMESCOUNT 20
|
||||
uint8_t times_index=0;
|
||||
float times[TIMESCOUNT];
|
||||
|
||||
|
||||
|
||||
|
||||
void setup() {
|
||||
pinMode(PIN_LED, OUTPUT);
|
||||
pinMode(PIN_SW1, INPUT_PULLUP);
|
||||
pinMode(PIN_SW2, INPUT_PULLUP);
|
||||
|
||||
pinMode(PIN_FLASH, OUTPUT);
|
||||
|
||||
digitalWrite(PIN_FLASH, HIGH);
|
||||
|
||||
for (uint8_t i=0;i<TIMESCOUNT;i++){
|
||||
times[i]=15;
|
||||
}
|
||||
|
||||
|
||||
Serial.begin(115200);
|
||||
}
|
||||
|
||||
void loop() {
|
||||
//digitalWrite(PIN_LED, sw1_flag);
|
||||
|
||||
if (sw1_released && !digitalRead(PIN_SW1)){ //pressed
|
||||
sw1_released=false;
|
||||
if (sw1_lastTime+SWDEBOUNCE<millis()){
|
||||
sw1_flag=true;
|
||||
sw1_lastTime=millis();
|
||||
sw1_lastTimeMicros=micros();
|
||||
}
|
||||
}else if (!sw1_released && digitalRead(PIN_SW1)){ //released
|
||||
sw1_released=true;
|
||||
}
|
||||
|
||||
|
||||
if (sw2_released && !digitalRead(PIN_SW2)){ //pressed
|
||||
sw2_released=false;
|
||||
if (sw2_lastTime+SWDEBOUNCE<millis()){
|
||||
sw2_flag=true;
|
||||
sw2_lastTime=millis();
|
||||
sw2_lastTimeMicros=micros();
|
||||
}
|
||||
}else if (!sw2_released && digitalRead(PIN_SW2)){ //released
|
||||
sw2_released=true;
|
||||
}
|
||||
|
||||
|
||||
|
||||
if (sw1_flag){
|
||||
sw1_flag=false;
|
||||
//Serial.println("SW1");
|
||||
}
|
||||
|
||||
if (sw2_flag){
|
||||
sw2_flag=false;
|
||||
|
||||
|
||||
|
||||
//Serial.println("SW2");
|
||||
unsigned long timediff=sw2_lastTimeMicros-sw1_lastTimeMicros;
|
||||
//Serial.println(timediff);
|
||||
float meterpersecond=1.0/timediff*sensordistance*1000000; // meter per s
|
||||
|
||||
//Serial.print(meterpersecond);
|
||||
//Serial.println(" m/s");
|
||||
|
||||
float kmh=meterpersecond*3.6;
|
||||
|
||||
if (kmh>=1){
|
||||
|
||||
if (kmh>getTimesMax()){
|
||||
digitalWrite(PIN_FLASH, LOW); //Trigger flash
|
||||
delay(100);
|
||||
digitalWrite(PIN_FLASH, HIGH);
|
||||
}
|
||||
|
||||
Serial.println(kmh);
|
||||
//Serial.println(" kmh");
|
||||
|
||||
|
||||
//add time to last times queue
|
||||
times_index++;
|
||||
times_index%=TIMESCOUNT-1;
|
||||
times[times_index]=kmh;
|
||||
|
||||
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
float getTimesMax(){
|
||||
float timesmax=0;
|
||||
for (uint8_t i=0;i<TIMESCOUNT;i++){
|
||||
if (timesmax<times[i]){
|
||||
timesmax=times[i];
|
||||
}
|
||||
}
|
||||
return timesmax;
|
||||
}
|
||||
4
lichtschranke/speedshow/speeds.txt
Normal file
4
lichtschranke/speedshow/speeds.txt
Normal file
|
|
@ -0,0 +1,4 @@
|
|||
1545871689576;13.18
|
||||
1545871689576;13.05
|
||||
1545871689576;12.91
|
||||
1545871689576;12.47
|
||||
89
lichtschranke/speedshow/speedshow.pde
Normal file
89
lichtschranke/speedshow/speedshow.pde
Normal file
|
|
@ -0,0 +1,89 @@
|
|||
import processing.serial.*;
|
||||
import java.io.FileWriter;
|
||||
import java.io.*;
|
||||
import java.util.*;
|
||||
|
||||
Serial myPort;
|
||||
String val = "0.0";
|
||||
|
||||
int speeds_show=5;
|
||||
float[] speeds=new float[speeds_show];
|
||||
int speeds_index=0; //points to next array index
|
||||
|
||||
float speedfloat=0;
|
||||
|
||||
Date d=new Date();
|
||||
|
||||
PrintWriter pw;
|
||||
|
||||
int unitdisplay=0;
|
||||
int unitdisplay_count=2; //how much different units available
|
||||
|
||||
void setup() {
|
||||
size(1500, 1000);
|
||||
frameRate(30);
|
||||
//String portName = "COM3";
|
||||
String portName = "/dev/ttyUSB0";
|
||||
myPort = new Serial(this, portName, 115200);
|
||||
|
||||
pw=createWriter("speeds.txt");
|
||||
|
||||
background(0);
|
||||
}
|
||||
|
||||
|
||||
// speed wird sein "20.08" oder
|
||||
|
||||
void draw() {
|
||||
if ( myPort.available() > 0) {
|
||||
val = myPort.readString();
|
||||
print("val = " + val);
|
||||
val = val.substring(0,val.length()-1);
|
||||
|
||||
speedfloat=float(val);
|
||||
|
||||
speeds[speeds_index]=speedfloat;
|
||||
speeds_index++;
|
||||
speeds_index%=speeds_show;
|
||||
|
||||
|
||||
println(d.getTime()+";"+speedfloat);
|
||||
pw.println(d.getTime()+";"+speedfloat);
|
||||
pw.flush();
|
||||
|
||||
unitdisplay=int(random(0,unitdisplay_count));
|
||||
unitdisplay=1;
|
||||
println("unitdisplay: "+unitdisplay);
|
||||
|
||||
}
|
||||
|
||||
background(0);
|
||||
fill(255);
|
||||
|
||||
textSize(150);
|
||||
|
||||
switch(unitdisplay){
|
||||
case 0:
|
||||
text(nf(speedfloat,1,2) + " km/h" , 100, 200);
|
||||
break;
|
||||
case 1:
|
||||
text(nf(speedfloat*0.000809848,1,6) + " Mach" , 100, 200);
|
||||
break;
|
||||
}
|
||||
|
||||
|
||||
|
||||
textSize(80);
|
||||
//println();
|
||||
int ipos=1;
|
||||
for (int i=speeds_show;i>0;i--){
|
||||
ipos++;
|
||||
text( nf(speeds[(speeds_show+speeds_index-1+i)%speeds_show], 1,2) , 100, 250+(ipos)*80);
|
||||
|
||||
//print(speeds[i]);
|
||||
//print(",");
|
||||
}
|
||||
|
||||
|
||||
|
||||
}
|
||||
15862
teststecke_35c3_20180617a.dxf
Normal file
15862
teststecke_35c3_20180617a.dxf
Normal file
File diff suppressed because it is too large
Load diff
2990
teststecke_35c3_20180617a_r12.dxf
Normal file
2990
teststecke_35c3_20180617a_r12.dxf
Normal file
File diff suppressed because it is too large
Load diff
15674
teststecke_35c3_20181213.dxf
Normal file
15674
teststecke_35c3_20181213.dxf
Normal file
File diff suppressed because it is too large
Load diff
2834
teststecke_35c3_20181213_r12.dxf
Normal file
2834
teststecke_35c3_20181213_r12.dxf
Normal file
File diff suppressed because it is too large
Load diff
BIN
teststrecke_35c3_20180617.png
Normal file
BIN
teststrecke_35c3_20180617.png
Normal file
{kind=link}
Binary file not shown.
|
After 
(image error) Size: 417 KiB |
BIN
teststrecke_35c3_20180617_text.png
Normal file
BIN
teststrecke_35c3_20180617_text.png
Normal file
{kind=link}
Binary file not shown.
|
After 
(image error) Size: 360 KiB |
BIN
teststrecke_35c3_20181205_boden.png
Normal file
BIN
teststrecke_35c3_20181205_boden.png
Normal file
{kind=link}
Binary file not shown.
|
After 
(image error) Size: 474 KiB |
Loading…
Reference in a new issue